Главная
Адаптивный зубчатый вариатор. Презентация. Реклама.
Зубчатая бесступенчато регулируемая передача реализует научное открытие профессора Иванова К.С.
«ЭФФЕКТ СИЛОВОЙ АДАПТАЦИИ В МЕХАНИКЕ»:
в механизме с двумя степенями свободы замкнутый контур обеспечивает адаптацию выходного вала к переменному моменту сопротивления за счет изменения его скорости вращения.
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ
Научно-производственное объединение «Зубчатая бесступенчато регулируемая передача» проводит фундаментальные и прикладные исследования в области создания принципиально новых зубчатых передач на основе запатентованного научного открытия «Эффект силовой адаптации в механике», опубликованного в мировой печати.
Объединение НПО ЗБРП разработало теорию адаптивных механизмов, которые обладают свойством самостоятельно приспосабливаться к переменной нагрузке (без системы управления), создало и проверило конструкции бесступенчато регулируемых передач.
Результаты научных исследований и конструкторских разработок доложены на многочисленных научных форумах, начиная с 1995 года, опубликованы в печати и поддержаны международными инновационными патентами.
Научно-производственная база машиностроительного производства определяется договором о сотрудничестве предприятий ИММАШ МОН РК, АУЭС, ВКГУ и АО Машиностроительный завод им. Кирова.
ЗУБЧАТАЯ БУССТУПЕНЧАТО РЕГУЛИРУЕМАЯ ПЕРЕДАЧА
Назначение
Зубчатая бесступенчато регулируемая передача (ЗБРП) предназначена для передачи движения на рабочий вал машины с переменным технологическим сопротивлением. ЗБРП обеспечивает вращение выходного вала со скоростью, которая зависит от нагрузки, в плавном диапазоне передаточных отношений. Механизм передачи содержит зубчатые колеса с постоянным зацеплением. Механизм работает без переключения передач. ЗБРП (или адаптивно-механическая передача) создана по открытию профессора Иванова К.С. «Эффект силовой адаптации в механике». Согласно этому открытию механизм с замкнутым контуром, содержащим зубчатые колеса, обеспечивает приспособляемость или адаптацию к переменной нагрузке.
Сопоставление передач
Используемая в настоящее время бесступенчато регулируемая передача (CVT) содержит гидротрансформатор и многоступенчатый переключаемый зубчатый планетарный механизм. Гидротрансформатор осуществляет дополнительную связь между звеньями планетарного механизма и обеспечивает саморегулирование передачи. Передача сложная и громоздкая. Система управления передачей создает переключение передач и не обеспечивает непрерывное соответствие скорости вращения вала нагрузке на нем.
Предлагаемая зубчатая бесступенчато регулируемая передача является адаптивно механической передачей. Адаптивно механическая передача содержит только адаптивный зубчатый механизм и чрезвычайно проста по конструкции.
На рис. 1 гидромеханическая передача, используемая в настоящее время, показана тонкими линиями.
Она содержит следующие части:
1. Гидротрансформатор.
2. Ступенчатая коробка передач с 4-мя или 5-ю ступенями зубчатых колес.
3. Гидромеханический переключающий механизм.
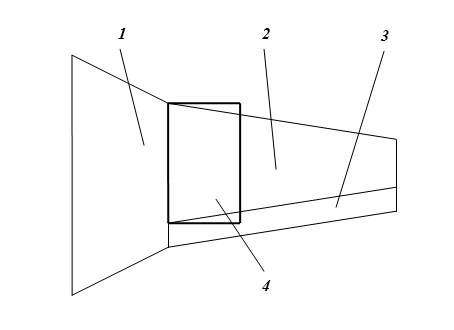
Рис. 1. Сопоставление гидромеханической и адаптивно-механической передач
Адаптивно-механическая передача, не имеющая аналогов в мировой практике, показана контурными линиями. Она содержит только адаптивный зубчатый механизм 4 – саморегулирующийся механизм без системы управления.
Теоретическое обоснование
Научное открытие эффекта силовой адаптации в механике является теоретической основой создания принципиально новой саморегулирующейся передачи с постоянным зацеплением зубчатых колес.
Зубчатая бесступенчатая саморегулирующаяся передача представляет собой замкнутый дифференциальный механизм с двумя степенями свободы. Зубчатый дифференциальный механизм, имеющий замкнутый контур с зубчатыми колесами, способен накладывать дополнительную связь на движение звеньев. Эта связь представляет собой уравнение взаимосвязи параметров входной и выходной мощности (постоянная входная мощность равна выходной мощности с переменными параметрами выходной угловой скорости и момента сопротивления). Теоретически доказана определимость движения зубчатой передачи при трогании с места (в состоянии с одной степенью свободы) и в эксплуатационном режиме движения. Передача обеспечивает также стоповый режим движения при продолжении вращения входного вала и остановке выходного вала.
Разработанные закономерности позволяют обоснованно выполнить геометрический и динамический синтез передачи по заданному диапазону передаточных отношений.
Описание адаптивно-механической передачи
Адаптивно-механическая передача представляет собой замкнутый дифференциальный механизм с двумя степенями свободы (рис. 2).
Основные части:
0 – стойка,
![]() – входное водило,
– входное водило,
![]() – выходное водило,
– выходное водило,
2 – входной сателлит,
5 – выходной сателлит,
1, 4 – солнечные колеса, объединенные в блок колес 1-4,
3, 6 – эпициклические (кольцевые) колеса, объединенные в блок колес 3-6.
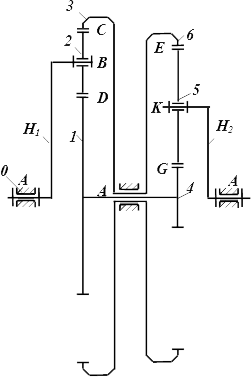
Рис. 2. Адаптивно-механическая передача (зубчатый вариатор)
Геометрические параметры:
Радиусы ![]() входного водила
входного водила ![]() и выходного водила
и выходного водила ![]() .
.
Числа зубьев колес ![]() .
.
Кинематические параметры:
Угловая скорость входного водила ![]() постоянна.
постоянна.
Угловая скорость выходного водила ![]() зависит от выходной нагрузки.
зависит от выходной нагрузки.
Силовые параметры:
Входной движущий момент ![]() на входном водиле
на входном водиле![]() постоянный.
постоянный.
Выходной момент сопротивления ![]() на выходном водиле
на выходном водиле![]() переменный, соответствующий внешней нагрузке.
переменный, соответствующий внешней нагрузке.
Входная мощность ![]() является постоянной.
является постоянной.
Выходная мощность ![]() без учета кпд равна входной мощности.
без учета кпд равна входной мощности.
Начало движения:
Входной движущий момент равен выходному моменту сопротивления ![]() . Движение передачи происходит в состоянии с одной степенью свободы. Передача движется как одно целое.
. Движение передачи происходит в состоянии с одной степенью свободы. Передача движется как одно целое.
Эксплуатационный режим движения:
Выходной момент сопротивления начинает превышать входной движущий момент![]() . Увеличение выходного момента сопротивления приводит к уменьшению угловой скорости выходного водила
. Увеличение выходного момента сопротивления приводит к уменьшению угловой скорости выходного водила ![]() при неизменной входной угловой скорости входного водила. При этом баланс мощности сохраняется
при неизменной входной угловой скорости входного водила. При этом баланс мощности сохраняется ![]() . Начинается относительное движение звеньев передачи. Движение передачи происходит в состоянии с двумя степенями свободы.
. Начинается относительное движение звеньев передачи. Движение передачи происходит в состоянии с двумя степенями свободы.
Передаточное отношение без учета кпд
![]() .
.
Максимальное передаточное отношение
![]() .
.
Диапазон изменения передаточного отношения
![]() .
.
Передача допускает стоповый режим движения при вращении входного вала и остановке выходного вала путем перехода в состояние с одной степенью свободы. В стоповом режиме движения![]() .
.
Связь между силовыми и кинематическими параметрами передачи определяется следующей теоремой:
Подвижный четырехзвенный замкнутый контур в кинематической цепи накладывает связь на движение звеньев этой цепи. Эта связь приводит к равновесию по принципу возможных перемещений
![]() . (1)
. (1)
Отсюда
![]() . (2)
. (2)
То есть при постоянной входной мощности ![]() выходная угловая скорость
выходная угловая скорость ![]() обратно пропорциональна переменному выходному моменту сопротивления
обратно пропорциональна переменному выходному моменту сопротивления![]() .
.
Уравнение (2) определяет эффект силовой адаптации механизма, приводящий к изменению скорости вращения выходного вала в зависимости от нагрузки на нем.
Коэффициент полезного действия адаптивного зубчатого вариатора
Адаптивный зубчатый вариатор имеет две степени свободы. Однако коэффициент полезного действия (кпд) этого вариатора принципиально отличается от кпд используемых в технике вариаторов с двумя степенями свободы (фрикционная муфта сцепления, гидродинамическая передача), в которых трение выполняет двигательную функцию. В зубчатом адаптивном вариаторе двигательная функция не основана на использовании трения. Двигательную функцию выполняет замкнутый контур из зубчатых колес. Потери энергии на трение в зубчатом адаптивном вариаторе связаны только с движением зубчатых колес как в обычном зубчатом вариаторе и не основаны на использовании трения как двигательной функции. Поэтому кпд адаптивного зубчатого вариатора значительно выше кпд фрикционной муфты сцепления или кпд гидродинамической передачи.
Гидродинамическая передача является передачей с двумя степенями свободы. Передаточное отношение гидродинамической передачи может изменяться от 1 до максимального значения (около 2), когда происходит остановка выходного вала. В момент остановки выходного вала кпд равен 0. Механическая адаптивная передача работает в похожем диапазоне передаточных отношений. Поэтому механическая адаптивная передача будет иметь аналогичный кпд.
Однако, в гидродинамической передаче выходной момент создается внутренним гидравлическим моментом сопротивления, который зависит от разности угловых скоростей насосного и турбинного колес. Кинематическое соединение насосного и турбинного колес не может быть идеальной кинематической парой. Это соединение функционально существует для преобразования внутреннего момента сопротивления во внешний выходной момент сопротивления. Гидравлический момент сопротивления одновременно определяет коэффициент энергетических потерь. Поэтому кпд гидродинамической передачи линейно уменьшается в зависимости от нагрузки.
Принципиально иная зависимость имеет место в механической адаптивной передаче. Эта зависимость определяется формулой (2), связывающей внешние моменты и скорости. Внутренний механический момент в замкнутом контуре механической адаптивной передачи также имеет место. Однако этот момент в передаче с идеальными связями не создает энергетических потерь, так как мощность (или работа) внутренних сил равна нулю. В механической адаптивной передаче происходит только перераспределение скоростей движения звеньев внутри замкнутого контура.
Таким образом, кпд механической адаптивной передачи функционально не зависит от внешней нагрузки и соответствует кпд планетарной передачи. В момент качественного изменения структуры вариатора при остановке выходного звена кпд мгновенно приобретает нулевое значение.
Кпд адаптивной адаптивного зубчатого вариатора (рис. 2) или кпд адаптивной зубчатой передачи будем определять по формуле
 , (3)
, (3)
где ![]() — полезная мощность на выходном водиле
— полезная мощность на выходном водиле ![]() ,
,
![]() — затраченная мощность на входном водиле
— затраченная мощность на входном водиле ![]() .
.
Адаптивная зубчатая передача (рис. 2) представляет собой зубчатый планетарный вариатор, который в зависимости от приложенной нагрузки может двигаться с одной или с двумя степенями свободы. Кпд адаптивной передачи зависит от режима движения.
Адаптивная зубчатая передача движется с одной степенью свободы, если выходной момент сопротивления равен входному движущему моменту
![]() .
.
В этом случае замкнутый контур, включающий зубчатые колеса 1, 2, 3, 6, 5, 4, движется как одно целое без относительной подвижности зубчатых колес внутри контура. Потери на трение имеют место только в двух вращательных кинематических парах ![]() , соединяющих входное и выходное водила со стойкой. Поэтому
, соединяющих входное и выходное водила со стойкой. Поэтому
![]() ,
,
где ![]() — кпд вращательной пары
— кпд вращательной пары ![]() .
.
Кпд всего вариатора в режиме движения с одной степенью свободы получим из формулы (3) после подстановки значения ![]()
![]() .
.
Адаптивная зубчатая передача движется с двумя степенями свободы, если выходной момент сопротивления больше входного движущего момента
![]() .
.
В этом случае происходит внутреннее относительное движение колес 1, 2, 3, 6, 5, 4 внутри замкнутого контура. Потери на трение имеют место не только в двух вращательных кинематических парах ![]() , соединяющих входное и выходное водила со стойкой, но и внутри контура, содержащего 4 вращательные кинематические пары (типа
, соединяющих входное и выходное водила со стойкой, но и внутри контура, содержащего 4 вращательные кинематические пары (типа ![]() ) и 4 высшие кинематические пары (типа
) и 4 высшие кинематические пары (типа ![]() — касание зубьев колес). Поэтому
— касание зубьев колес). Поэтому
![]() ,
,
где ![]() — кпд высшей кинематической пары типа
— кпд высшей кинематической пары типа ![]() .
.
Кпд всего вариатора в режиме движения с двумя степенями свободы получим из формулы (3) после подстановки значения ![]()
![]() .
.
Практическая реализация
Практическая реализация включает следующее:
1. Патент Германии № 20 2012 101 273.1.
Патент России № 2398989.
Патенты Казахстана: №3208, №11042, №12236, №14477, №17378, №023907, №24181, №24625, № 26107, №79226.
2. На рис. 3 представлен сборочный чертеж адаптивно механической передачи привода конвейера.
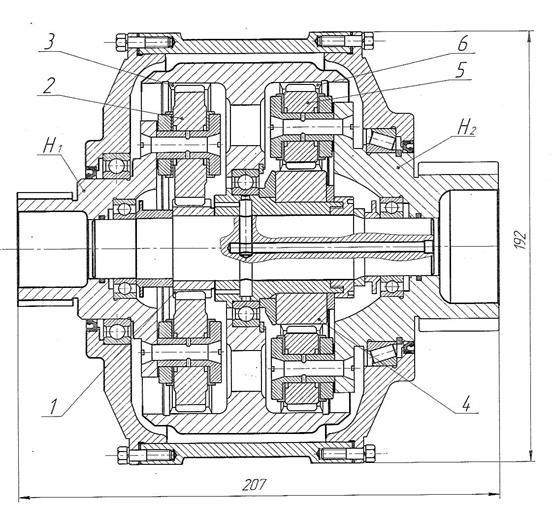
Рис. 3. Сборочный чертеж зубчатой бесступенчато регулируемой передачи
3. Компьютерная анимационная модель зубчатой адаптивно механической передачи представлена на рис. 4. Она показывает движение звеньев при изменении внешней нагрузки. Анимационная модель содержит двигатель (серого цвета слева), передачу без корпуса (входное водило с входным сателлитом зеленого цвета, блок солнечных колес красного цвета, блок эпициклических колес синего цвета, выходной сателлит зеленого цвета с выходным водилом) и тормоз (справа красного цвета), имитирующий выходной момент сопротивления. Двигатель имеет постоянные параметры мощности (угловая скорость и движущий момент). Тормоз создает переменный момент сопротивления. При увеличении выходного момента сопротивления выходное водило замедляет движение и наоборот.
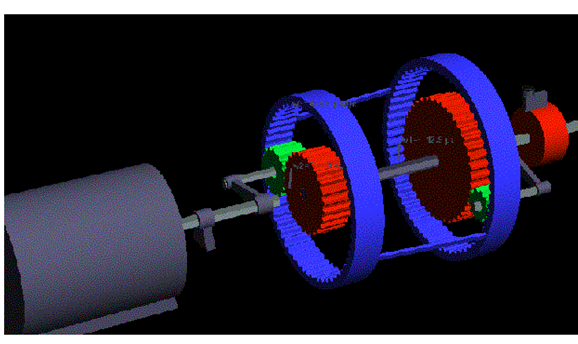
Рис. 4. Анимационная модель адаптивно механической передачи
4. Действующий макет зубчатой адаптивно механической передачи (рис. 5). Макет подтверждает наличие силовой адаптации в зубчатом механизме с замкнутым контуром.
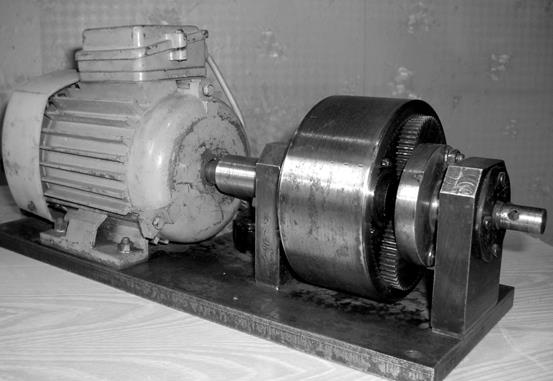
Рис. 5. Действующий макет зубчатой адаптивно механической передачи
5. Компьютерная модель адаптивно механической коробки передач (рис. 6).
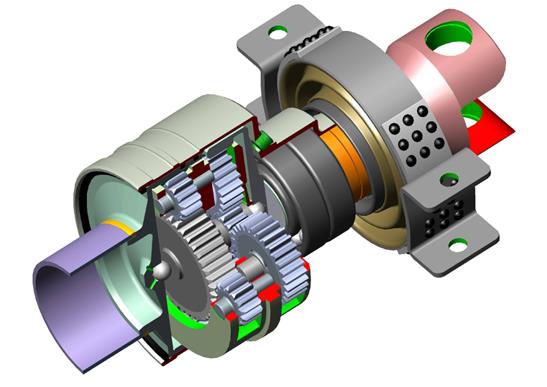
Рис. 6. Компьютерная модель адаптивно механической передачи
6. Испытания адаптивно-механической бесступенчато регулируемой передачи.
Проверка наличия эффекта силовой адаптации в бесступенчато регулируемой передаче была выполнена на испытательном стенде (рис. 7).
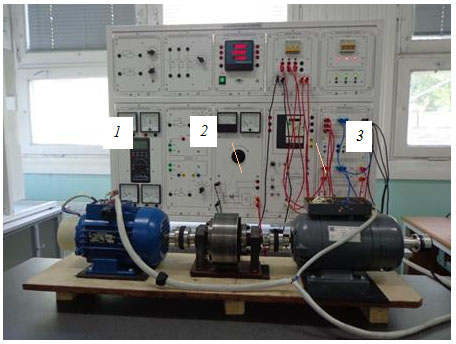
Рис. 7. Стенд для испытания зубчатого адаптивного вариатора
На испытательном стенде представлен электродвигатель 1 постоянной мощности, который приводит в движение адаптивный вариатор 2 (адаптивно-механическую передачу). Вариатор передает движение на электрический генератор 3, который имитирует внешнюю переменную нагрузку. Внешняя нагрузка изменяется путем изменения силы тока в обмотке возбуждения генератора 3. Измерительные приборы регистрируют момент сопротивления на выходном валу вариатора 2 и частоту его вращения при постоянной входной мощности электродвигателя 1.
На рис. 8 представлена экспериментальная тяговая характеристика зубчатого адаптивного вариатора в виде графика изменения тягового момента на выходном валу в Нм в зависимости от скорости его вращения в об/мин.
Тяговый момент на выходном валу механизма в эксплуатационном режиме движения равен переменному моменту сопротивления.
Тяговая характеристика содержит следующие участки. Режим пуска (старта) – кривая ![]() и эксплуатационный режим движения – кривая
и эксплуатационный режим движения – кривая ![]() .
.
В режиме пуска при включении электродвигателя движущий момент быстро изменяется от нуля до номинального значения, соответствующего мощности электродвигателя. Механизм движется в режиме пуска (кривая ![]() ) в состоянии с одной степенью свободы как одно целое. Внутреннее относительное движение колес внутри замкнутого контура отсутствует. Выходной вал механизма вращается с номинальной скоростью вращения вала электродвигателя. В точке
) в состоянии с одной степенью свободы как одно целое. Внутреннее относительное движение колес внутри замкнутого контура отсутствует. Выходной вал механизма вращается с номинальной скоростью вращения вала электродвигателя. В точке ![]() характеристики тяговый момент на выходном валу адаптивного механизма равен входному моменту или моменту на валу электродвигателя
характеристики тяговый момент на выходном валу адаптивного механизма равен входному моменту или моменту на валу электродвигателя ![]() . Скорость вращения (частота вращения) выходного вала равна частоте вращения входного вала
. Скорость вращения (частота вращения) выходного вала равна частоте вращения входного вала ![]() .
.
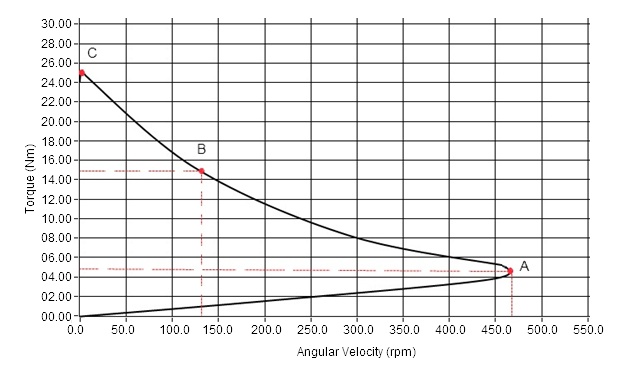
![]() – движение в состоянии с одной степенью свободы при отсутствии внутренней подвижности в контуре,
– движение в состоянии с одной степенью свободы при отсутствии внутренней подвижности в контуре, ![]() – движение с двумя степенями свободы (эксплуатационный режим),
– движение с двумя степенями свободы (эксплуатационный режим), ![]() – промежуточная точка,
– промежуточная точка, ![]() – конец эксплуатационного режима (максимальный момент сопротивления и остановка).
– конец эксплуатационного режима (максимальный момент сопротивления и остановка).
Рис. 8. Экспериментальная тяговая характеристика зубчатого адаптивного механизма
Эксплуатационный режим движения начинается в точке ![]() кривой
кривой ![]() , когда выходной момент сопротивления начинает превышать номинальный тяговый момент
, когда выходной момент сопротивления начинает превышать номинальный тяговый момент![]() . В этом случае механизм переходит в состояние с двумя степенями свободы. Происходит силовая адаптация. Частота вращения выходного вала самостоятельно изменяется в обратной зависимости от момента сопротивления. Входной момент и входная частота вращения остаются без изменения. Они равны соответствующим номинальным значениям параметров электродвигателя.
. В этом случае механизм переходит в состояние с двумя степенями свободы. Происходит силовая адаптация. Частота вращения выходного вала самостоятельно изменяется в обратной зависимости от момента сопротивления. Входной момент и входная частота вращения остаются без изменения. Они равны соответствующим номинальным значениям параметров электродвигателя.
Например, в точке ![]() тяговый момент на выходном валу и соответствующий ему момент сопротивления имеет значение
тяговый момент на выходном валу и соответствующий ему момент сопротивления имеет значение![]() , частота вращения выходного вала равна
, частота вращения выходного вала равна ![]() .
.
Максимальный тяговый момент на выходном валу имеет место в точке ![]() . В этой точке максимальный тяговый момент равен максимальному моменту сопротивления
. В этой точке максимальный тяговый момент равен максимальному моменту сопротивления ![]() . Частота вращения выходного вала при подходе к точке
. Частота вращения выходного вала при подходе к точке ![]() становится минимальной
становится минимальной ![]() , а затем в точке
, а затем в точке ![]() происходит остановка выходного вала механизма
происходит остановка выходного вала механизма ![]() . Входной вал продолжает вращаться с номинальной скоростью вращения электродвигателя
. Входной вал продолжает вращаться с номинальной скоростью вращения электродвигателя ![]() . Механизм переходит в состояние с одной степенью свободы, когда входной вал вращается, а выходной вал остановлен. Имеет место так называемый стоповый режим работы.
. Механизм переходит в состояние с одной степенью свободы, когда входной вал вращается, а выходной вал остановлен. Имеет место так называемый стоповый режим работы.
Теоретические результаты согласуются с результатами испытаний на стенде. Замкнутый контур в составе кинематической цепи с двумя степенями свободы при наличии идеальных связей обеспечивает определенность движения как в состоянии с двумя степенями свободы (в эксплуатационном режиме движения), так и в состоянии с одной степенью свободы (при пуске).
Заключение
Теоретически обосновано создание зубчатой бесступенчатой саморегулирующейся передачи в виде зубчатого замкнутого дифференциального механизма с двумя степенями свободы. Экспериментально подтверждена правильность полученных теоретических закономерностей.
Зубчатая бесступенчатая саморегулирующаяся передача с постоянным зацеплением колес является простейшей регулируемой передачей и имеет надежность, соответствующую надежности зубчатого механизма. Указанные свойства позволяют использовать передачу для привода машин с переменным технологическим сопротивлением. Передачу можно использовать как в легких приводах машин (велосипедов, мотоциклов, манипуляторов), так и в тяжелых приводах машин (легковых автомобилей, грузовых автомобилей, автобусов, тракторов, бульдозеров, буровых установок, прокатных станов), в том числе и в мотор-колесах транспортных машин.